

Машины для общения с пользователем
Следующее, что мы должны реализовать после подключения дисплея – это средства управления, общения с пользователем: у нас есть кнопки (одна основная, а вторая будет «для администрирования»: вызова глобальных настроек и калибровки), также у нас есть энкодер. При этом механический энкодер, по сути своей, - две кнопки.
Получается два уровня работы с кнопками: «физический» - тут мы будем избегать дребезга – и «логический», куда будет относиться работа с длиной нажатия кнопкок (при моделировании мы решили, что будем различать короткое и длительное нажатие на кнопку) и работа с энкодером.
В итоге получаем целых три виртуальных машины: машина «физических» кнопок (машина защиты от дребезга; знает о физическом расположении кнопок; возвращает информацию о том, в каком состоянии кнопка: отпущена или нажата, также сигнализирует, когда произошло нажатие или отпуск кнопки), машина «логических» кнопок (получает информацию от машины защиты от дребезга (при этом в этой машине уже не важно физическое расположение выводов кнопки), возвращает информацию о том, нажата ли кнопка и каким образом: кратким или долгим нажатием). Машина же энкодера тоже получает информацию от машины защиты от дребезга, а возвращать должна информацию о повороте энкодера в ту или иную сторону.
Машина «физических» кнопок (защиты от дребезга)
Начнём с машины защиты от дребезга.Дребезг контактов — явление, происходящее в электромеханических устройствах (кнопках, реле, переключателях и др.), длящееся некоторое время после замыкания электрических контактов. После замыкания происходят многократные неконтролируемые замыкания и размыкания контактов за счет упругости материалов и деталей контактной системы — некоторое время контакты «подпрыгивают» при соударениях, размыкая и замыкая электрическую цепь.
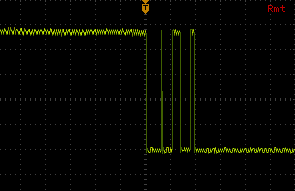
Рисунок 1. Пример дребезга контактов.
Чтобы обойти дребезг, достаточно несколько раз за короткое время проверить состояние кнопки – если каждый раз получилось одно и то же значение – значит, оно «устойчиво»; на сам же дребезг, когда состояние кнопки меняется несколько раз за короткое время, просто не будем обращать внимания.
Определим вход и выход машины: на вход получаем расположение физических выводов кнопок; на выход же мы должны возвращать текущее очищенное от дребезга состояние кнопки (флаг), а также нам потребуются флажки, а точнее, посылки (тут вставить сноску на определение посылок и флагов, разницы между ними), которые будут извещать о нажатии на кнопку (передний фронт, очищенный от дребезга, переход от состояния «Кнопка отпущена» в состояние «Кнопка нажата») и о отпускании кнопки (задний фронт, переход от «Кнопка нажата» в «Кнопка отпущена»).
Так как в задаче фигурирует фраза «короткое время» - значит, будем использовать прерывание – то же самое, что и для работы с дисплеем. Нам нужно определять текущее состояние кнопки, а потом увеличивать или уменьшать некоторый счётчик; потом уже в основной программе мы будем сравнивать счётчик с максимумом – тогда считаем, что кнопка нажата – и с минимумом – тогда считаем, что кнопка отпущена.
Попробуем представить алгоритм, работающий в прерывании:
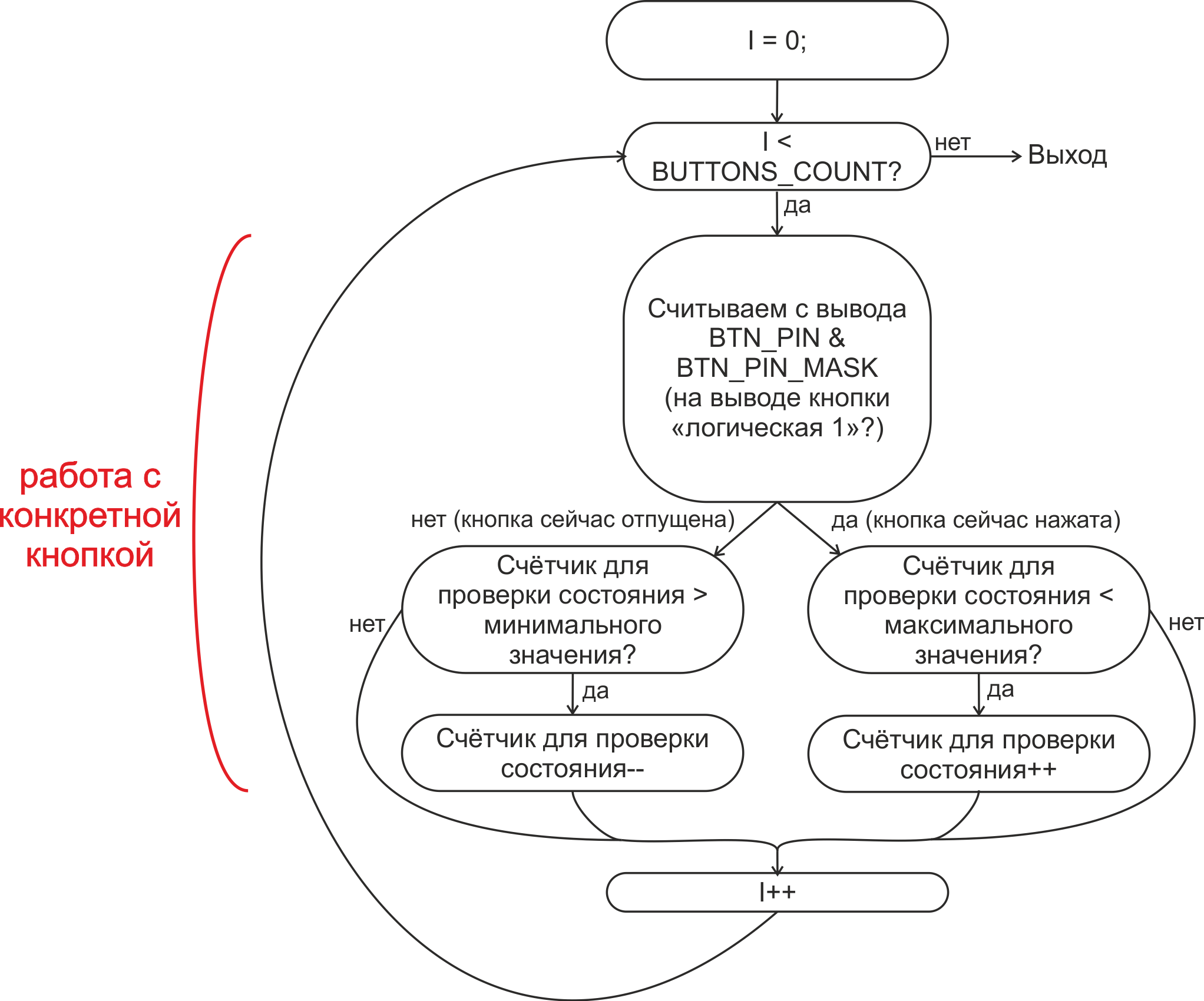
Рисунок 2. Алгоритм прерывания для защиты от дребезга с использованием счётчика.
Как видно – очень, очень много действий, при этом этот алгоритм выполняется для каждой «физической» кнопки – в нашем случае, 4 раза каждый раз, когда вызывается прерывание, а вызывается оно часто – этак ещё пара прерываний, и у нас не останется времени на основную программу!
Нужно сделать так, чтобы вся работа по расчёту состояния кнопки была в основном цикле, а в прерывании мы запоминали текущее состояние – и только!
Также нужно учитывать, что для анализа состояния кнопки нам нужно хранить несколько «текущих» состояний кнопки, и эти состояния могут быть только или 0, или 1. Поэтому мы можем просто взять один байт, и считать его «хранилищем состояний», очередью, где каждый бит – это текущее состояние кнопки.
У нас кнопки и энкодер подключены так, что когда на выводе «1» - кнопка отпущена, когда «0» - кнопка нажата. Получаем примерно такой вариант возможной очереди:
| Исходное состояние: | 11111111 | |
| Получаем новое состояние: | <- | 11111110 |
| Потом получаем дребезг: | <- | 11111101 |
| <- | 11111010 | |
| <- | 11110101 | |
| Дальше стабильное нажатие: | <- | 11101010 |
| <- | 11010100 | |
| <- | 10101000 | |
| <- | 01010000 | |
| ... | ||
| <- | 00000000 | |
По умолчанию будем считать, что все кнопки отпущены:
currStateFIFO = 0xFF
Тогда для того, чтобы запомнить текущее состояние, достаточно будет пары действий:
currStateFIFO = currStateFIFO << 1; if (ButtonPIN & ButtonMask) currStateFIFO |= 1;
Тогда очередь сдвинется, вытесняя самое старое значение, а младшим битом будет текущее состояние кнопки.
Так, больше в прерывании делать нам нечего.
Теперь будем думать, что делать дальше. У нас есть очередь с информацией о состоянии кнопок, и нам нужно сигнализировать, когда кнопка изменяет состояние. Используем виртуальную машину.
У кнопки в данной машине может быть 4 состояния: «Ждём нажатия», «Передний фронт», «Ждём отпускания», «Задний фронт» (заметим, что понятия переднего и заднего фронта определяются именно логически, то есть переходами из отпущенного состояния к нажатому, и наоборот; при этом помним, что реально кнопка нажата, когда на выводе «логический 0»).
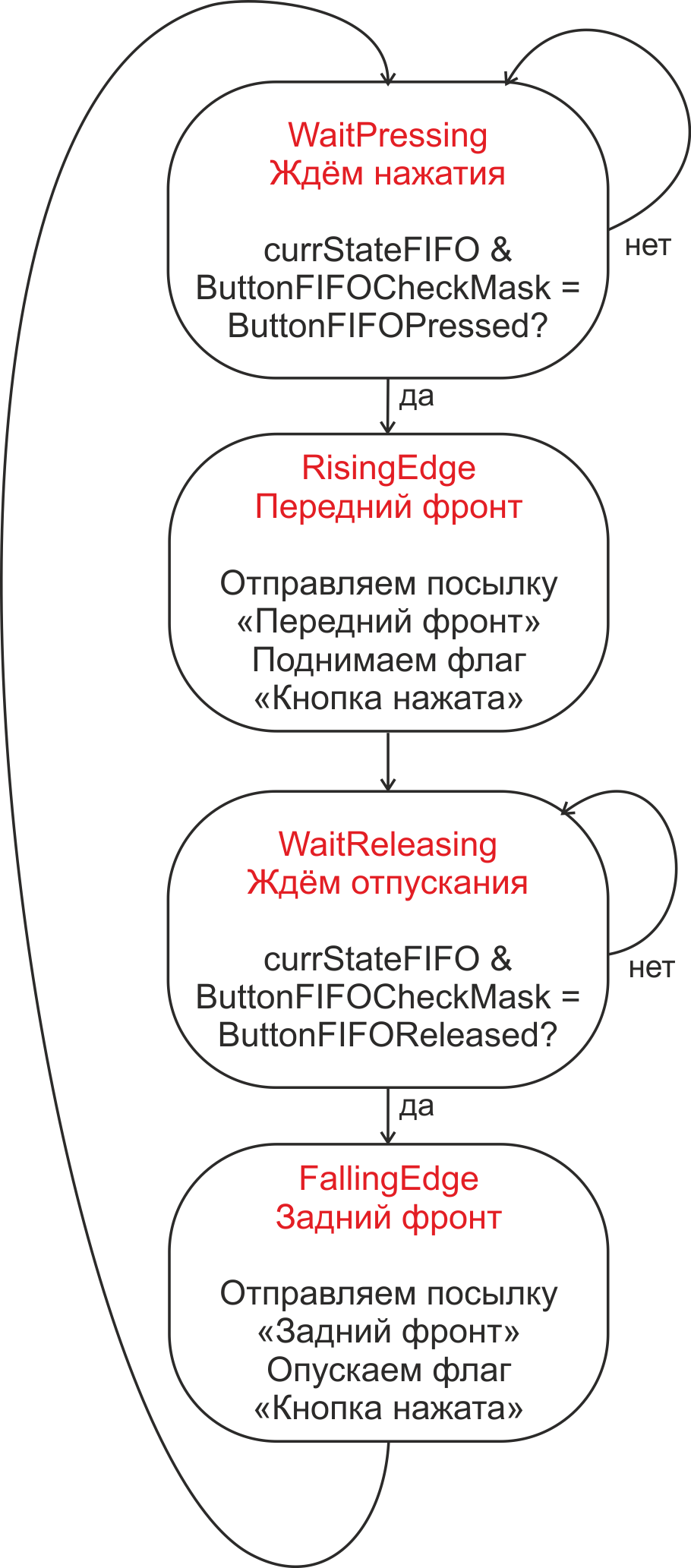
Рисунок 3. Алгоритм работы виртуальной машины «физических» кнопок (защиты от дребезга).
Немного пояснений: допустим, нам нужно проверить 5 раз состояние кнопки, чтобы убедиться, что дребезга нет.
Тогда выделяем маску для проверки последний 5 состояний в очереди: ButtonFIFOCheckMask будет равно 0x1F.
Дальше нужно определить, чему должны равняться эти 5 значений, чтобы считать кнопку нажатой или отпущенной: если кнопка нажата, то в очереди должно быть xxx00000, где xxx – старое состояние, которое нам не важно; если кнопка нажата, то в очереди должно быть xxx11111.
С виртуальной машиной разобрались, можно переходить ближе к коду.
Сначала определим переменные – для каждой «физической» кнопки создадим структуру, которая будет хранить входящие, выходящие данные и также внутренние переменные:
//состояния виртуальной машины физической кнопки (защита от дребезга)
typedef enum {pbsWaitPressing, pbsRisingEdge, pbsWaitReleasing, pbsFallingEdge} TVMPhysicalButtonState;
//сама структура виртуальной машины для физической кнопки (защиты от дребезга)
typedef struct
{
uint8_t* pbPin; //указатели на выводы порта, к которому относится элемент
uint8_t* pbDdr;
uint8_t* pbPort;
uint8_t pbPinMask; //маска вывода кнопки
uint8_t pbCurrStateFIFO; //очередь из "текущих состояний"
TVMPhysicalButtonState pbMachineState;
//выходные данные - посылки и флаг
uint8_t pbOnRisingEdge: 1;
uint8_t pbOnFallingEdge: 1;
uint8_t pbIsOn: 1;
uint8_t pbPinNumber: 3; //номер вывода порта: 0-7, достаточно 3-х бит
} TVMPhysicalButton;
На что тут стоит обратить внимание: на описание выходных данных – они представляют собой битовые поля. Язык Си позволяет использовать в структурах битовые поля, имеющие вид:
тип имя: длина
Тип – это int, unsigned или signed
Имя – это, собственно, способ обращения к данному элементу структуры.
Длина – это количество бит, выделенных для данного поля.
Например:
struct TBitfieldExample
{
int a: 9;
int b: 4;
uint8_t c: 3;
uint8_t d: 4;
}
Так будет представлена эта структура в памяти микроконтроллера AVR:

Рисунок 4. Представление битовых полей в памяти
Отметим, что несмотря на то, что битовое поле c влезло бы в оставшуюся память к типу int, компилятор выделяет его отдельно, так как «тип текущего битового поля не совпадает с типом предыдущего битового поля».
Таким образом, для сохранения 4 различных переменных нам понадобится всего 3 байта, тогда как без использования битовых полей потребовалось бы 6 байт (вообще 5, если сделать b не int, а unsigned char).
Битовые поля, состоящие только из 1 бита, не могут относится к знаковому типу; так, для объявления однобитных полей можно использовать тип unsigned char, выделяя тем самым 8 бит. Мы используем неклассическую запись uint8_t, которая объявлена в библиотеке stdint.h - так сразу понятно, знаковая или беззнаковая переменная, а также её размер.
Для битовых полей есть ряд ограничений: например, нельзя получить адрес битового поля, а также нельзя создавать массивы битовых полей (но можно создавать массивы структур, содержащих битовые поля).
Также нужно учитывать, что операции с битовыми полями неатомарны, даже если битовые поля "однобайтный" тип (unsigned char или uint8_t) - значит, при использовании таких полей и в прерываниях, и в теле основной программы придётся запрещать прерывания (что всегда не очень желательно).
Начнём по порядку – в самом начале нам нужно проинициализировать данную структуру, причём как в рамках библиотеки: переменные, флаги и посылки - так и в основном цикле: здесь мы будем инициализировать сами порты ввода-вывода (настраивать ddr и port), а также укажем в расположение кнопок в структуре (pbDdr, pbPort, pbPin, pbPinMask).
Получаем вот такую библиотеку:
Заголовочный файл:
//работа с физическими кнопками (защита от дребезга)
#ifndef PHYSICAL_BUTTON_H
#define PHYSICAL_BUTTON_H
#include "ioavr.h"
#include "inavr.h"
#include "stdint.h"
//состояния виртуальной машины физической кнопки (защита от дребезга)
typedef enum {pbsWaitPressing, pbsRisingEdge, pbsWaitReleasing, pbsFallingEdge} TVMPhysicalButtonState;
//сама структура виртуальной машины для физической кнопки (защиты от дребезга)
typedef struct
{
uint8_t* pbPin; //указатели на выводы порта, к которому относится элемент
uint8_t* pbDdr;
uint8_t* pbPort;
uint8_t pbPinMask; //маска вывода кнопки
uint8_t pbCurrStateFIFO; //очередь из "текущих состояний"
TVMPhysicalButtonState pbMachineState;
//выходные данные - посылки и флаг
uint8_t pbOnRisingEdge: 1;
uint8_t pbOnFallingEdge: 1;
uint8_t pbIsOn: 1;
uint8_t pbPinNumber: 3; //номер вывода порта: 0-7, достаточно 3-х бит
} TVMPhysicalButton;
#define PHYSICAL_BUTTONS_COUNT 4
extern TVMPhysicalButton VMPhysicalButtons[PHYSICAL_BUTTONS_COUNT];
//прерывание для считывания текущего состояния кнопки
void PhysicalButtonMachineInterrupt();
//виртуальная машина для "физических кнопок" (защиты от дребезга)
void PhysicalButtonMachine();
//инициализация "физических кнопок"
void PhysicalButtonMachineInit();
#endif
Отметим, что в заголовочном файле указан массив для физических кнопок, но объявлен как «extern» - это значит, что переменная на самом деле объявляется в другом файле (файле .c или в основном файле проекта, например).
Теперь файл .c:
#include "PhysicalButton.h"
#define PHYSICAL_BUTTON_FIFO_CHECK_MASK 0x1F
#define PHYSICAL_BUTTON_FIFO_PRESSED 0
#define PHYSICAL_BUTTON_FIFO_RELEASED 0x1F
TVMPhysicalButton VMPhysicalButtons[PHYSICAL_BUTTONS_COUNT];
//прерывание для считывания текущего состояния кнопки
void PhysicalButtonMachineInterrupt()
{
uint8_t i;
TVMPhysicalButton* currVMPhysicalButton;
currVMPhysicalButton = &VMPhysicalButtons[0];
for (i = 0; i < PHYSICAL_BUTTONS_COUNT; i++)
{
currVMPhysicalButton->pbCurrStateFIFO <<= 1; //добавляем текущее состояние кнопки в очередь
if (*(currVMPhysicalButton->pbPin) & currVMPhysicalButton->pbPinMask)
currVMPhysicalButton->pbCurrStateFIFO |= 1;
/*
//или
currVMPhysicalButton->pbCurrStateFIFO = (currVMPhysicalButton->pbCurrStateFIFO << 1) |
((*(currVMPhysicalButton->pbPin) >> currVMPhysicalButton->pbPinNumber) & 1);
*/
currVMPhysicalButton++;
}
}
//виртуальная машина для "физических кнопок" (защиты от дребезга)
void PhysicalButtonMachine()
{
uint8_t i;
TVMPhysicalButton* currVMPhysicalButton;
uint8_t currFIFOState;
currVMPhysicalButton = &VMPhysicalButtons[0];
for (i = 0; i < PHYSICAL_BUTTONS_COUNT; i++)
{
switch (currVMPhysicalButton->pbMachineState)
{
case pbsWaitPressing: //ждём нажатия - проверяем очередь
__disable_interrupt();
currFIFOState = currVMPhysicalButton->pbCurrStateFIFO;
__enable_interrupt();
if ((currFIFOState & PHYSICAL_BUTTON_FIFO_CHECK_MASK) == PHYSICAL_BUTTON_FIFO_PRESSED)
currVMPhysicalButton->pbMachineState = pbsRisingEdge;
break;
case pbsRisingEdge: //передний фронт - отправляем посылку и возводим флаг
currVMPhysicalButton->pbIsOn = 1;
currVMPhysicalButton->pbOnRisingEdge = 1;
currVMPhysicalButton->pbMachineState = pbsWaitReleasing;
break;
case pbsWaitReleasing: //ждём, когда кнопка будет отпущена - проверяем очередь
__disable_interrupt();
currFIFOState = currVMPhysicalButton->pbCurrStateFIFO;
__enable_interrupt();
if ((currFIFOState & PHYSICAL_BUTTON_FIFO_CHECK_MASK) == PHYSICAL_BUTTON_FIFO_RELEASED)
currVMPhysicalButton->pbMachineState = pbsFallingEdge;
break;
case pbsFallingEdge: //задний фронт - отправляем посылку и опускаем флаг
currVMPhysicalButton->pbIsOn = 0;
currVMPhysicalButton->pbOnFallingEdge = 1;
currVMPhysicalButton->pbMachineState = pbsWaitPressing;
break;
}
currVMPhysicalButton++;
}
}
//инициализация "физических кнопок"
void PhysicalButtonMachineInit()
{
uint8_t i;
for (i = 0; i < PHYSICAL_BUTTONS_COUNT; i++)
{
//определяем маску для вывода кнопки на основе номера вывода
VMPhysicalButtons[i].pbPinMask = 1 << VMPhysicalButtons[i].pbPinNumber;
//инициализируем кнопку на вход с подтяжкой
*VMPhysicalButtons[i].pbPort |= VMPhysicalButtons[i].pbPinMask;
*VMPhysicalButtons[i].pbDdr &= ˜VMPhysicalButtons[i].pbPinMask;
//считаем по умолчанию, что кнопка отпущена
VMPhysicalButtons[i].pbCurrStateFIFO = PHYSICAL_BUTTON_FIFO_RELEASED;
//очищаем флаг и посылки, изначально считаем, что кнопка не нажата
VMPhysicalButtons[i].pbIsOn = 0;
VMPhysicalButtons[i].pbOnFallingEdge = 0;
VMPhysicalButtons[i].pbOnRisingEdge = 0;
VMPhysicalButtons[i].pbMachineState = pbsWaitPressing;
}
}
Здесь все согласно схеме виртуальной машины.
Ну и основные изменения в основном файле:
/*
Использование выводов:
D0 - D7 - семисегментный дисплей, шина данных
B0 - B5 - семисегментный дисплей, шина адресации
C0 - АЦП, получение текущей температуры
C1 - управление нагревательным элементом
C2 - кнопка для глобальных настроек и калибровки
С3 - "основная" кнопка
C4 - C5 - энкодер
B6 - B7 - часовой кварц
*/
//выводим на дисплей нужные нам строки
#include "SegmentDisplay.h"
#include "PhysicalButton.h"
#include "ioavr.h"
#include "inavr.h"
#include "stdint.h"
//инициализация таймера Т0
void FastTimerInit()
{
__disable_interrupt();
TCCR0A = 0;
TCCR0B = (1 << CS01); //таймер 0 включён с предделителем 8 в нормальном режиме;
TIMSK0 |= (1 << TOIE0); //разрешили прерывание по переполнению Т0
__enable_interrupt();
}
//прерывание таймера Т0
#pragma vector = TIMER0_OVF_vect
__interrupt void FastTimerInterrupt(void)
{
RedrawDispInterrupt(); //перерисовка дисплея
PhysicalButtonMachineInterrupt(); //машина "физических" кнопок - защита от дребезга
}
//инициализация кнопок и энкодера
void InitButtonsAndEncoder()
{
uint8_t i;
//определяем местоположение физических кнопок (4 штуки)
for (i = 0; i < PHYSICAL_BUTTONS_COUNT; i++)
{
//записываем физические данные в структуру
VMPhysicalButtons[i].pbPin = (uint8_t*)&PINC;
VMPhysicalButtons[i].pbDdr = (uint8_t*)&DDRC;
VMPhysicalButtons[i].pbPort = (uint8_t*)&PORTC;
VMPhysicalButtons[i].pbPinNumber = i + 2;
}
PhysicalButtonMachineInit(); //инициализируем машину "физических" кнопок - защитыуот дребезга
}
void main( void )
{
DDRB = 0;
PORTB = 0;
DDRD = 0;
PORTD = 0;
DDRC = 0;
PORTC = 0;
DisplayInit();
InitButtonsAndEncoder();
FastTimerInit();
while(1)
{
PhysicalButtonMachine();
if (VMPhysicalButtons[1].pbOnRisingEdge) //если передний фронт - принимаем посылку и пишем сообщение
{
DisplayShowStr("PRESS");
VMPhysicalButtons[1].pbOnRisingEdge = 0;
}
if (VMPhysicalButtons[1].pbOnFallingEdge) //если задний фронт - принимаем посылку и пишем сообщение
{
DisplayShowStr("RELEASED");
VMPhysicalButtons[1].pbOnFallingEdge = 0;
}
}
}
В результате при включении контроллера дисплей не горит; при нажатии на кнопку выводится сообщение «PrESS», при отпускании оно меняется на «rELEAS».
Вот ссылка на проект с выделенной библиотекой "физических" кнопок (защиты от дребезга).
А вот отдельно прошивка.
Автор - Moriam =ˆˆ=